Regeling burgerluchthavens
Bijlage 2 Voorschrift voor de berekening en bepaling van de 10-5 en 10-6 plaatsgebonden risicocontouren en het Totaal risicogewicht voor overige burgerluchthavens
Geldend
als bedoeld in artikel 5, eerste lid van de Regeling burgerluchthavens
Symbool | Eenheid | Omschrijving |
|---|---|---|
αl | – | Weegfactor in de sommatie van het baanafhankelijke en routeafhankelijke deel van de verdeling van de kansdichtheid voor undershoots zwaar verkeer |
αs | – | Weegfactor in de sommatie van het baanafhankelijke en routeafhankelijke deel van de verdeling van de kansdichtheid voor overshoots zwaar verkeer |
β | – | Vormparameter in Weibull-verdeling |
γ | – | Weegfactor in de sommatie van het baanafhankelijke en routeafhankelijke deel van de verdeling van de kansdichtheid voor landend licht verkeer |
η | – | Schaalparameter in Weibull-verdeling |
θ | ○ | Hoek van de aan- of uitvliegrichting ten opzichte van het noorden, met de positieve richting rechtsom |
µ | – | Verwachtingswaarde |
σ | – | Standaardafwijking |
Δθ | ○ | De ingesloten sectorhoek |
a | – | Schaalparameter |
b | – | Vormparameter |
i | – | Index voor een cel, bij de berekening van het plaatsgebonden risico in de cel |
j | – | Index voor een vliegtuigbeweging |
k | – | Index voor een cel, bij de berekening van de bijdrage aan het plaatsgebonden risico |
n | – | Index voor een sector |
ot | – | Ongevaltype |
p | – | Weegfactor in de sommatie van kansdichtheid verdelingsfuncties |
PL | – | De locatiekans |
PO | – | De kans op een ongeval |
POL | – | De ongevallocatiekans |
q | – | Verkeerspercentage helikopterverkeer in een sector |
r | m | Afstand tot de helikopterlandingsplaats |
s | m | De afstand tot de baankop langs een gegeven route |
t | m | De afstand loodrecht tot een gegeven route |
u | m | De afstand tot de baankop langs de baan-as |
v | m | De afstand loodrecht tot de baan-as |
x | m | Coördinaat in het stelsel van de Rijksdriehoeksmeting |
y | m | Coördinaat in het stelsel van de Rijksdriehoeksmeting |
Acirkelsegment | m2 | Het oppervlak van een cirkelsegment |
AOGB | m2 | Het oppervlak van het ongevalgevolggebied |
Ai | m2 | Het oppervlak van het cel i |
L | – | De letaliteit |
PR | – | Het plaatsgebonden risico |
ROGB | m | Straal van het ongevalgevolggebied |
XBK | m | x Coördinaat baankop |
XBD | m | x Coördinaat baandrempel |
XH | m | x Coördinaat helikopterlandingsplaats |
YBD | m | y Coördinaat baandrempel |
YBK | m | y Coördinaat baankop |
YH | m | y Coördinaat helikopterlandingsplaats |
Beweging | Een start of landing met een luchtvaartuig gerelateerd aan een luchthaven. |
Cel | Een cel, als onderdeel van het rekenraster, is een gebied met de vorm van een vierkant waarvan de zijde gelijk is aan de maaswijdte van het studiegebied. |
Combi flight | Vlucht met zowel passagiers als vracht. |
Crew training flight | Vlucht onder supervisie van een instructeur of examinator om de vliegtuigbemanning op te leiden of om de bevoegdheid van de vliegtuigbemanning te examineren of te onderhouden. |
Ferry flight | Een vlucht zonder betalende passagiers of betaalde lading om het vliegtuig naar de gewenste locatie te verplaatsen. |
Generatie | Classificatie van vliegtuigtypes op grond van het technologisch uitrustingsniveau. Hierbij wordt gelet op het ontwerp van de cockpit, de instrumentatie en het besturingssysteem. |
Gewichtscategorie | Categorisering op basis van het maximaal startgewicht. |
Helikopter | Gemotoriseerd luchtvaartuig met rotorbladen, zwaarder dan lucht, dat hoofdzakelijk in de lucht gehouden kan worden door aerodynamische reactiekrachten op zijn rotorbladen. |
Helikopterbeweging | Beweging in start- of landingsfase met een helikopter. |
Helikoptercategorie | Categorisering van helikopters op basis van motortype en doeleinde van de beweging. |
Helikopterlandingsplaats | Een terrein bestemd voor het opstijgen en landen van helikopters. |
Kansdichtheid | Ruimtelijke verdeling van de kans op een ongeval, afhankelijk van de ligging van baan en route. |
Letaliteit | De fractie mensen buiten het luchtvaartuig, maar binnen het ongevalgevolggebied, dat bij een ongeval met een luchtvaartuig overlijdt. |
Licht verkeer | Alle bewegingen met vliegtuigen met een MTOW kleiner dan 5.700 kilogram. |
Locatiekans | Gegeven een ongeval, de kans dat dit op een bepaalde locatie plaatsvindt. |
Luchthaven | Verzamelnaam voor luchthavens voor vliegtuigen en helikopters en helikopterlandingsplaats. |
Luchtvaartuig | Verzamelnaam voor vliegtuigen en helikopters. |
Luchthavenluchtverkeer | Het opstijgen en landen van luchtvaartuigen op een luchthaven en de daarmee verband houdende bewegingen van luchtvaartuigen op de grond. |
Meteotoeslag | Toeslag op het baangebruik van een verkeersprognose om rekening te houden met de onzekerheid in het verwachte baangebruik als gevolg van de jaarlijkse veranderingen in het weer. |
MTOW | Maximaal startgewicht (Engels: Maximum Take-Off Weight) voor helikopter of vliegtuig. |
Ongevalgevolggebied | Het gebied waarbinnen de gevolgen van een ongeval met een luchtvaartuig potentieel dodelijk zijn. |
Ongevalkans | De kans, per beweging, op een ongeval van een bepaald type. |
Ongevallocatie | Locatie waar een ongeval plaatsvindt. |
Ongevallocatiekans | De kans (per jaar) dat op een bepaalde locatie een ongeval plaatsvindt. |
Ongevaltype | Classificatie van het soort ongeval, onderverdeeld naar: landing overrun, landing undershoot, take-off overrun, take-off overshoot en veer-off. |
Plaatsgebonden risico | De kans per jaar dat een denkbeeldig persoon, die zich permanent op dezelfde locatie in de omgeving van een luchthaven bevindt, komt te overlijden als direct gevolg van een ongeval met een luchtvaartuig. |
(Plaatsgebonden) risicoberekening | Berekening voor het bepalen van de plaatsgebonden risicocontouren ten behoeve van het luchthavenbesluit, luchthavenregeling of voor een 5-jarige evaluatie en handhaving. |
Referentievlak | Het horizontale vlak van het stelsel van de Rijksdriehoeksmeting. |
Regelgeving burgerluchthavens en militaire luchthavens (RBML) | Wet, houdende wijziging van de Wet luchtvaart inzake vernieuwing van de regelgeving voor burgerluchthavens en militaire luchthavens en de decentralisatie van bevoegdheden voor burgerluchthavens naar het provinciaal bestuur. |
Risicocontour | Grens van het gebied waarbinnen het plaatsgebonden risico hoger is dan een bepaalde (gekozen) waarde, zoals 10-5 of 10-6. |
Rijksdriehoeksmeting | Coördinaatsysteem (x,y) in meters, ook wel GBKN of grootschalige basiskaart Nederland genoemd, met de oorsprong nabij Parijs, Frankrijk. |
Route | Beschrijving van waar vliegtuigen vliegen x, y, gedefinieerd door achtereenvolgende rechte segmenten en cirkelsegmenten in het studiegebied. |
Scenario | Geheel van relevante gegevens van alle bewegingen in een specifiek jaar voor een luchthaven, op basis waarvan een EV-analyse kan worden uitgevoerd. |
Sector | Deel van aan- en uitvliegrichtingen waar een deel van de helikopterbewegingen plaatsvindt. |
Totaal risicogewicht (TRG) | Het totale risico als functie van het aantal bewegingen, ongevalkansen en maximale startgewichten van het luchthavenluchtverkeer per jaar. |
Aan- of uitvliegrichting | Koers van de helikopter tijdens de landing of start. |
Vliegtuigbeweging | Beweging in start- of landingsfase met een vliegtuig. |
Vliegtuig | Vastevleugelvliegtuig. |
Zwaar verkeer | Alle bewegingen met vliegtuigen met een MTOW groter dan en gelijk aan 5.700 kilogram. |
Zakenjet | Straalvliegtuigen specifiek ontworpen voor zakelijk en privévervoer. |
1. Achtergrond
1.1. Algemeen
Dit voorschrift geeft aanwijzingen voor de berekening en bepaling van de 10-5 en 10-6 plaatsgebonden risicocontouren en het totaal risicogewicht (TRG) van het luchthavenluchtverkeer als bedoeld in artikel 5, eerste lid, van de Regeling burgerluchthavens.
Voor het vaststellen van een luchthavenbesluit moeten de 10-5 en 10-6 plaatsgebonden risicocontouren berekend en bepaald worden voor het voorgenomen verkeersscenario. Voor de bepaling van de sloopzones dient de 10-5 plaatsgebonden risicocontour gebruikt te worden, waarbij rekening dient te worden gehouden met de onzekerheid in het verwachte baangebruik als gevolg van het weer. Voor het gebruik van de plaatsgebonden risicocontour als grens van een beperkingengebied in een luchthavenbesluit, dient de contour gestileerd te worden. Daarnaast kan voor een luchthavenbesluit een grenswaarde voor het totaal risicogewicht worden bepaald. In de berekening van zowel het 10-6 plaatsgebonden risico als het TRG wordt geen rekening gehouden met de onzekerheid in het verwachte baangebruik als gevolg van het weer. Dit geldt ook voor de vijfjaarlijkse evaluatieberekening van de plaatsgebonden risicocontouren 10-5 en 10-6 van het feitelijke gebruik van de luchthaven.
1.2. Doel van het voorschrift
Dit voorschrift heeft tot doel op eenduidige wijze de berekeningsmethodieken te beschrijven, waarmee conform artikel 5, eerste lid, van de Regeling burgerluchthavens de 10-5 en 10-6 plaatsgebonden risicocontouren en het totaal risicogewicht van de overige burgerluchthavens dienen te worden uitgerekend en bepaald.
1.3. Scope van het voorschrift
Het voorschrift geeft een beschrijving van de te volgen berekeningswijze voor de berekening en bepaling van plaatsgebonden risicocontouren en het TRG, inclusief de invoergegevens die daarbij nodig zijn en de wijze waarop beperkingengebieden bepaald dienen te worden. Het gaat niet in op de wijze waarop het scenario van het luchthavenluchtverkeer voor een luchthavenbesluit wordt samengesteld en hoe de invoergegevens voor de berekening dienen te worden vastgesteld.
1.4. Beknopte beschrijving van het voorschrift
In deze paragraaf wordt het voorschrift voor de berekening en bepaling van de plaatsgebonden risicocontouren en het TRG op hoofdlijnen beschreven. In hoofdstuk 3 en verder is dit in meer detail uitgewerkt.
1.4.1. 10-5 en 10-6 plaatsgebonden risicocontouren
De plaatsgebonden risicocontouren worden berekend in een plat vlak rondom de luchthaven. De berekening verloopt in hoofdlijn volgens vier stappen:
- 1.
Het selecteren en toepassen van de ongevalkansen van de bewegingen met vliegtuigen en helikopters tijdens de start- en landingsfase van of naar de betreffende luchthaven. Hierbij wordt rekening gehouden met de categorie van het vliegtuig of de helikopter.
- 2.
Het selecteren en toepassen van de kansverdelingen van ongevallocaties in de omgeving van de luchthaven. Het rekenmodel houdt rekening met de ligging van de start- en landingsbanen, de helikopterlandingsplaatsen, de vliegroutes en aan- en uitvliegrichtingen. De kans op een ongeval neemt af met toenemende afstand tot de vliegroute en luchthaven.
- 3.
Het bepalen van de gevolgen van ongevallen. Zowel de grootte van het ongevalgevolggebied als de kans op overlijden binnen dit gebied zijn hierop van invloed. De categorie en het maximum startgewicht van de helikopter of het vliegtuig zijn daarvoor bepalend.
- 4.
Door in het studiegebied voor alle bewegingen in een jaar de plaatsgebonden risico’s te berekenen en te sommeren kunnen de 10-5 en 10-6 plaatsgebonden risicocontouren worden bepaald.
Voor de aanduiding van de beperkingengebieden in een luchthavenbesluit dienen de 10-5 en de 10-6 plaatsgebonden risicocontour berekend te worden. Bij de berekening van de 10-5 plaatsgebonden risicocontour dient rekening te worden gehouden met de onzekerheid in het verwachte baangebruik als gevolg van het weer. Dit geldt niet voor de berekening van de plaatsgebonden risicocontouren voor de vijfjaarlijkse evaluatie. Voor de bepaling van de beperkingengebieden dienen de berekende risicocontouren gestileerd te worden.
1.4.2. Totaal risicogewicht
Het TRG is een functie van de ongevalkansen en de maximale startgewichten van luchtvaartuigen waarmee in een jaar bewegingen plaatsvinden. Bij de berekening van het TRG of de bepaling van een TRG grenswaarde dient geen rekening te worden gehouden met de onzekerheid in het (verwachte) baangebruik als gevolg van het weer.
1.5. Leeswijzer
Hoofdstuk 2 geeft een toelichting op de te hanteren invoergegevens voor een risicoberekening. Een gedetailleerde beschrijving van de rekenstappen en bepaling van de plaatsgebonden risicocontouren is opgenomen in de hoofdstukken 3 t/m 6 en het rekenvoorschrift voor het totaal risicogewicht is opgenomen in hoofdstuk 7.
2. Algemeen
2.1. Studiegebied
Het plaatsgebonden risico wordt berekend in punten die in het horizontale vlak van het stelsel van de Rijksdriehoeksmeting liggen. Dit referentievlak ligt op maaiveldhoogte.
De afmetingen van het studiegebied moeten zo gekozen worden dat de afstand tussen de 10-6 plaatsgebonden risicocontour en de rand van het studiegebied minimaal 200 meter bedraagt. Uit praktische overweging wordt veelal een vierkant of rechthoekig gebied met de luchthaven ongeveer in het midden gekozen als studiegebied [Ref. 1].
2.2. Invoergegevens
Voor het uitvoeren van een risicoberekening zijn invoergegevens nodig, die het verloop van het startende en landende luchthavenluchtverkeer, de ‘traffic’, van een luchthaven specificeren. De benodigde gegevens zijn hieronder samengevat en worden in de volgende paragrafen verder toegelicht:
- •
Luchthavengegevens
- •
Routes voor vliegtuigen
- •
Sectorverdeling voor helikopters
- •
Gegevens luchthavenluchtverkeer
- •
Meteotoeslag
2.3. Luchthavengegevens
De luchthavengegevens betreffen de ligging van start- en landingsbanen en helikopterlandingsplaatsen van een luchthaven.
2.3.1. Start- en landingsbanen
De coördinaten (XBK,YBK) van de baankoppen en (XBD,YBD) van de baandrempels per baankop in het referentievlak moeten bekend zijn. Wanneer de baan als startbaan wordt ingezet geldt de baandrempel als beginpunt van de start van een vertrekkend vliegtuig. Bij inzet van de baan als landingsbaan is de baandrempel het punt waar een landend vliegtuig de baan het eerst raakt.
2.3.2. Helikopterlandingsplaatsen
De coördinaten (XH,YH) van de helikopterlandingsplaatsen in het referentievlak moeten bekend zijn. De helikopterlandingsplaats is het punt van waar een helikopter opstijgt en waar een helikopter landt.
2.4. Routes voor vliegtuigen
Een route is de projectie van het nominale vliegpad in het grondvlak waarlangs vliegtuigen bij een start of nadering van of naar de start- of landingsbaan vliegen. De routes bestaan uit opeenvolgende rechte segmenten en cirkelsegmenten gegeven in het referentievlak. In een berekening van de 10-5 en 10-6 plaatsgebonden risicocontouren worden vliegtuigbewegingen gekoppeld aan nominale routes.
2.5. Sectorverdeling voor helikopters
In de bepaling van het plaatsgebonden risico voor helikopters wordt een verband gelegd tussen de locatiekansdichtheid en de aan- en uitvliegrichtingen van de helikopterlandingsplaats. De overheersende aan- en uitvliegrichtingen dienen te worden gespecificeerd door een sectorverdeling. De sectorverdeling beschrijft de aan- en uitvliegrichtingen middels sectoren en per sector welk deel van de starts en landingen binnen die aan- of uitvliegrichting plaatsvindt.
2.6. Gegevens luchthavenluchtverkeer
De benodigde gegevens van het luchthavenluchtverkeer betreffen de afzonderlijke bewegingen op jaarbasis. Een vliegtuigbeweging wordt gekenmerkt door vliegtuigcategorie, baankop, route, vluchtfase en MTOW van het vliegtuig. Een helikopterbeweging wordt gekenmerkt door een helikoptercategorie, vluchtfase en MTOW van de helikopter.
Voor de berekening van de plaatsgebonden risicocontour 10-5 (ter bepaling van de sloopzones) voor een luchthavenbesluit dient rekening te worden gehouden met de onzekerheid in het verwachte baangebruik als gevolg van het weer. Dit kan gedaan worden door een meteotoeslag in het verkeersscenario op te nemen. Dit is in paragraaf 2.7 nader uitgewerkt. De vliegtuig- of helikoptercategorie van een beweging bepaalt de ongevalkans voor de beweging. Deze categorieën worden hierna nader gespecificeerd.
2.6.1. Vliegtuigen
Voor vliegtuigen hangt de vliegtuigcategorie af van de operatie (gebruik) en het MTOW van het vliegtuig. Voor passagiersvliegtuigen geldt een verdere opsplitsing naar vliegtuiggeneraties. Voor de luchthavens Maastricht, Eelde, Lelystad, Rotterdam en Twente geldt een categorisering naar generatie voor vrachtvliegtuigen (cargo). Tabel 1 toont de diverse vliegtuigcategorieën.
Aanduiding | Omschrijving categorie |
|---|---|
Licht1500 | Vliegtuigen met een MTOW < 1.500 kg |
Licht5700 | Vliegtuigen met een MTOW van 1.500 kg tot 5.700 kg |
Business Jet | Straalvliegtuigen specifiek ontworpen voor zakelijk en privé vervoer(zakenjets) met MTOW ≥ 5.700 kg voor alle doeleinden behalve vrachtvervoer. |
Cargo | Vliegtuigen (MTOW ≥ 5.700 kg) specifiek voor vrachtvervoer |
Cargo Gen.1 | Generatie 1 vliegtuigen voor vrachtvervoer met MTOW ≥ 5.700 kg |
Cargo Gen.2 | Generatie 2 vliegtuigen voor vrachtvervoer met MTOW ≥ 5.700 kg |
Cargo Gen.3 | Generatie 3 vliegtuigen voor vrachtvervoer met MTOW ≥ 5.700 kg |
Pax Gen.1 | Generatie 1 vliegtuigen voor passagiersvervoer met MTOW ≥ 5.700 kg |
Pax Gen.2 | Generatie 2 vliegtuigen voor passagiersvervoer met MTOW ≥ 5.700 kg |
Pax Gen.3 | Generatie 3 vliegtuigen voor passagiersvervoer met MTOW ≥ 5.700 kg |
2.6.2. Helikopters
De helikoptercategorieën worden onderscheiden naar type motor:
Single Engine Piston (SEP)
Single Engine Turbine (SET)
Multi Engine Turbine (MET)
Bij het motortype SEP wordt verder onderscheid gemaakt naar het gebruiksdoel van de beweging, zie Tabel 2.
Aanduiding | Omschrijving categorie |
|---|---|
SEP training en instructie | Helikopter met één zuigermotor voor training en instructie |
SEP overige doeleinden | Helikopter met één zuigermotor voor doeleinden anders dan training en instructie |
SET | Helikopter met één turbine motor |
MET | Helikopter met meerdere turbine motoren |
2.6.3. Toewijzen van luchtvaartuigen aan categorieën
Bij de toewijzing van luchtvaartuigen aan de vliegtuig- en helikoptercategorieën, uit tabel 1 en 2, dient uitgegaan te worden van de lijst met standaard vliegtuiggegevens voor vliegtuigen en helikopters die in beheer en beschikbaar is bij het RIVM. Wanneer een berekening wordt uitgevoerd ten behoeve van toetsing aan grenswaarde, dient van dezelfde versie van de lijst uitgegaan te worden als waarmee de grenswaarde bepaald zijn. Wanneer een luchtvaartuig niet is opgenomen in deze versie van de lijst dan mag de meest recente versie geraadpleegd worden voor de benodigde informatie. Bij overige berekeningen dient van de meest recente lijst uitgegaan te worden.
Als een ICAO-typecode ontbreekt, dan geldt afhankelijk van het luchtvaartuig:
- A)
Het luchtvaartuig voldoet aan één van de volgende criteria:
- •
Civiel vliegtuig (d.w.z. gemotoriseerde vliegtuig)
- •
Civiel helikopter met een MTOW tot 12.000 kg
- •
Civiel variant van een militair vliegtuig
- •
Civiel variant van een militaire helikopter met een MTOW tot 12.000 kg
- •
Historisch militair vliegtuig.
In dit geval moeten de bijbehorende vliegtuig-/helikoptergegevens zelf bepaald worden en in de rapportage onderbouwd worden. Het luchtvaartuig dient als dusdanig te worden ingedeeld. Tevens dient een ‘verzoek uitbreiding lijst met standaard vliegtuiggegevens’ via GEVERS@rivm.nl ingediend te worden.
- B)
Het luchtvaartuig voldoet aan één van de volgende criteria:
- •
Helikopter met MTOW boven 12.000 kg
- •
MLA (Micro Light Aeroplane)
- •
(Motor)zweefvliegtuig
- •
(Motor)zeilvliegtuig
- •
Autogiro
- •
Overig militair vliegtuig of militaire helikopter.
In dit geval dient het luchtvaartuig niet in de berekeningen verwerkt te worden.
Om voor een vliegtuig met een MTOW vanaf 5.700 kg te bepalen of het in de ‘Cargo’ of ‘Pax’ categorie valt dienen de volgende vier criteria langs gelopen te worden. Voldoet de vlucht aan alle vier de criteria dan gaat het om een ‘Cargo’ vlucht, in de overige gevallen gaat het om een ‘Pax’ vlucht:
- 1.
Het vliegtuig wordt gebruikt voor vrachtvervoer
- 2.
Het betreft geen ‘combi flight’
- 3.
Het betreft geen ‘ferry flight’
- 4.
Het betreft geen ‘crew training flight’.
2.7. Meteotoeslag
De verdeling van het luchthavenluchtverkeer over de omgeving is mede afhankelijk van de weersomstandigheden die van invloed zijn op het baangebruik. Jaarlijkse fluctuaties in het weer kunnen leiden tot fluctuaties in het baangebruik over de jaren. Bij het vaststellen van de 10-5 plaatsgebonden risicocontouren dient rekening te worden gehouden met die weersafhankelijkheid, omdat deze contouren de basis vormen voor vaststelling van sloopzones voor een luchthavenbesluit en er zo groot mogelijke zekerheid moet zijn dat 10-5 plaatsgebonden risico’s in enig jaar niet buiten de sloopzones vallen. In verband hiermee kan bij de vaststelling van deze contouren gebruik worden gemaakt van de ‘meteotoeslag’.
De meteotoeslag wordt toegepast op het nominale aantal bewegingen op een baan. De hoogte van de meteotoeslag is op basis van onderzoek vastgesteld op 20% [Ref 4.]. De verdeling van de 20% meteotoeslag over de start-/landingsbaan (of -banen) van de luchthaven dient gemotiveerd te worden.
Bovenstaande methodiek dient niet te worden toegepast in de berekening van de 10-6 plaatsgebonden risicocontour. Het gegeven dat de contouren jaarlijks fluctueren rond een gemiddelde waarde door de jaarlijkse fluctuaties in het weer, waardoor plaatsgebonden risico’s bij gebouwen in de buurt van de contour per jaar hoger of lager kunnen uitvallen dan 10-6, wordt geaccepteerd. Deze contour heeft slechts consequenties voor nieuwbouw en kan indien gewenst bovendien worden aangepast naar aanleiding van de vijfjaarlijkse berekening van het feitelijke gebruik. Bij de vijfjaarlijkse evaluatie van de beperkingengebieden, waarbij het verkeer van het voorafgaande jaar gebruikt wordt, dient de gekozen methodiek getoetst te worden. Ook bij de vijfjaarlijkse berekening van het feitelijke gebruik en bij de berekening van het totaal risicogewicht wordt geen meteotoeslag toegepast.
3. Berekenen plaatsgebonden risico vliegtuigen
Dit hoofdstuk beschrijft het berekenen van het plaatsgebonden risico voor een verzameling van vliegtuigbewegingen van en naar een luchthaven in het studiegebied. De berekening van het plaatsgebonden risico voor helikopters is in hoofdstuk 4 beschreven.
3.1. Plaatsgebonden risico
Voor het bepalen van de 10-5 en 10-6 plaatsgebonden risicocontouren wordt een raster van vierkante cellen gedefinieerd binnen een studiegebied. De maaswijdte van dit raster dient 25 meter te zijn. Het plaatsgebonden risico wordt berekend voor het middelpunt van de cel. Deze waarde wordt binnen de cel constant verondersteld. Het raster moet om de 40 cellen samenvallen met de gehele kilometerwaarden van het stelsel van de Rijksdriehoeksmeting, hier aangeduid (x, y) als coördinatenstelsel. Zie Figuur 1.
Figuur 1. Ligging van netwerk en celmiddelpunten t.o.v. roosterpunten in stelsel van Rijksdriehoekmeting

Het plaatsgebonden risico (PRi) wordt in elke cel van het studiegebied afzonderlijk bepaald en is in een cel (i) gelijk aan de som van de bijdragen van alle bewegingen in die cel.

De bijdrage van de overige cellen aan het plaatsgebonden risico (PRi) van cel (i) van vliegtuigbeweging (j) wordt bepaald door voor alle overige cellen (k) in het studiegebied het plaatsgebonden risico (PRi,j,k) te bepalen dat bijdraagt aan het plaatsgebonden risico van (PRi) van cel (i):

De bijdrage aan het plaatsgebonden risico (PRi,j,k) in cel (i) van de kans op een ongeval van beweging j in cel k is gelijk aan het product van de letaliteit (Lj) en de ongevallocatiekans (POL) behorend bij cel k en beweging j en de fractie overlap van het ongevalgevolggebied (AOGB) van cel (k) met cel (i):

3.2. Ongevallocatiekans
De ongevallocatiekans (POL) is de kans dat een ongeval op een bepaalde locatie plaatsvindt. De ongevallocatiekans is het product van de kans op een ongeval tijdens de beweging (PO) en de locatiekans (PL), die de ruimtelijke verdeling (kansdichtheid) ten opzichte van de baan en route weerspiegelt. De ongevallocatiekans wordt voor verschillende ongevaltypen (ot) afzonderlijk bepaald en gesommeerd. De ongevallocatiekans van een beweging (j) in cel (k) is gelijk aan de som van de ongevallocatiekansen van alle ongevaltypes.

De ongevalkans, de ruimtelijke kansverdeling van ongevallocaties en de ongevalgevolgen worden in de volgende paragrafen beschreven.
3.3. Ongevalkans
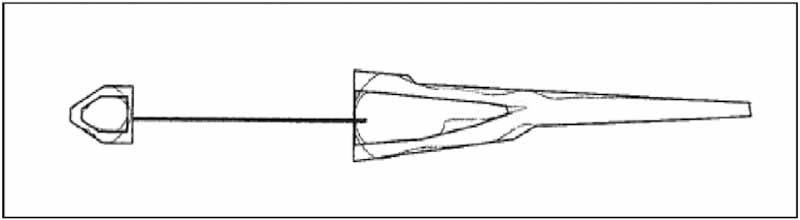
Er wordt onderscheid gemaakt naar vier typen vliegtuigongevallen, zie Figuur 2:
- •
Landing undershoot: een ongeval tijdens de landingsfase waarbij het vliegtuig op de grond vóór de baan terechtkomt.
- •
Landing overrun: een ongeval waarbij het vliegtuig bij de landing aan het einde van de baan rijdend de baan verlaat.
- •
Take-off overrun: ongeval waarbij het vliegtuig bij de take-off aan het einde van de baan rijdend de baan verlaat.
- •
Take-off overshoot: een ongeval waarbij het vliegtuig nadat het is opgestegen weer op de grond terechtkomt.
Figuur 2. Schematische weergave van ongevaltypen voor vliegtuigen

Per ongevaltype zijn ongevalkansen gedefinieerd. De in de Tabel 3 vermelde ongevalkansen per vliegtuigbeweging dienen in de berekening van het plaatsgebonden risico te worden toegepast. Er wordt onderscheid gemaakt naar vluchtfase (start of landing), ongevaltype en vliegtuigcategorie.
Vliegtuigcategorie | Start | Landing | ||
Licht1500 | 1,58 × 10-6 | 5,53 × 10-6 | ||
Licht5700 | 1,58 × 10-6 | 5,53 × 10-6 | ||
Overrun | Overshoot | Overrun | Overshoot | |
Business Jet | 1,83 × 10-6 | 0,029 × 10-6 | 4,58 × 10-6 | 4,58 × 10-6 |
Cargo | 2,11 × 10-6 | 2,81 × 10-6 | 3,51 × 10-6 | 3,51 × 10-6 |
Cargo Gen.1 | 2,89 × 10-6 | 3,85 × 10-6 | 4,81 × 10-6 | 4,81 × 10-6 |
Cargo Gen.2 | 0,87 × 10-6 | 1,16 × 10-6 | 1,45 × 10-6 | 1,45 × 10-6 |
Cargo Gen.3 | 0,25 × 10-6 | 0,33 × 10-6 | 0,41 × 10-6 | 0,41 × 10-6 |
Pax Gen.1 | 1,05 × 10-6 | 0,029 × 10-6 | 3,66 × 10-6 | 5,24 × 10-6 |
Pax Gen.2 | 0,066 × 10-6 | 0,029 × 10-6 | 0,90 × 10-6 | 1,95 × 10-6 |
Pax Gen.3 | 0,066 × 10-6 | 0,029 × 10-6 | 0,73 × 10-6 | 0,17 × 10-6 |
3.4. Ongevallocatie
Bij een ongeval is de locatiekans de kans dat het ongeval zich voordoet op een bepaalde locatie. Het verloop van de locatiekansen in het studiegebied wordt de kansdichtheid (KDH) genoemd. De KDH per ongevaltype wordt bepaald door verdelingsfuncties. De waarde van de verdelingsfunctie in een cel wordt bepaald voor het celmiddelpunt en wordt binnen de cel constant verondersteld. Er zijn verdelingsfuncties gedefinieerd voor combinaties van ongevaltype en gewichtscategorie. Een verdelingsfunctie gaat ofwel van een routeafhankelijk coördinatenstelsel (s,t) uit, ofwel van een baanafhankelijk coördinatenstelsel (u,v). Hierna komen achtereenvolgens aan de orde:
- 1.
de selectie van verdelingsfuncties
- 2.
de transformatie van de coördinaten van het celmiddelpunt
- 3.
singuliere punten en discontinuïteiten
- 4.
toepassen van de verdelingsfuncties
3.4.1. Selectie van verdelingsfuncties
Tabel 4 laat de verdelingsfuncties zien voor de gewichtscategorie en vluchtfase.
Gewichtscategorie | Vluchtfase | Ongevaltype | Route afhankelijk | Baan afhankelijk |
|---|---|---|---|---|
Licht (MTOW < 5.700 kg) | Start | – |
| – |
Landing | – |
|
| |
Zwaar (MTOW ≥ 5.700 kg) | Start | (over)shoot |
|
|
(over)run | – |
| ||
Landing | (under)shoot |
|
| |
(over)run | – |
|







Deze verdelingsfuncties zijn samengesteld uit statistische kansverdelingen. Hierna volgt een overzicht van de kansverdelingen die gebruikt worden:
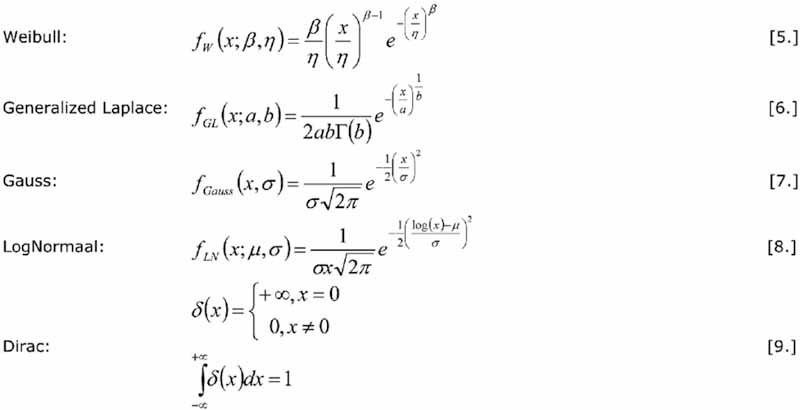
De Dirac-verdeling wordt geïmplementeerd als een blokfunctie, symmetrisch ten opzichte van de route, met een vaste breedte van 100 m.
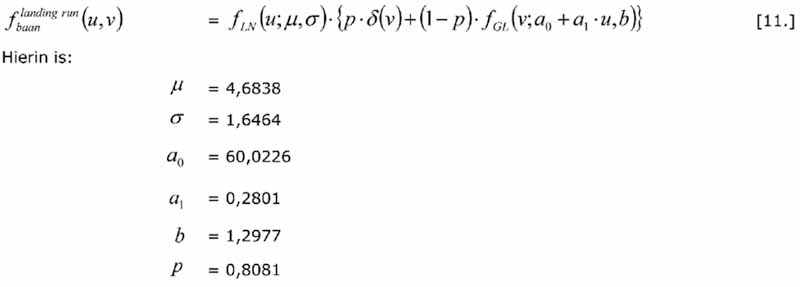
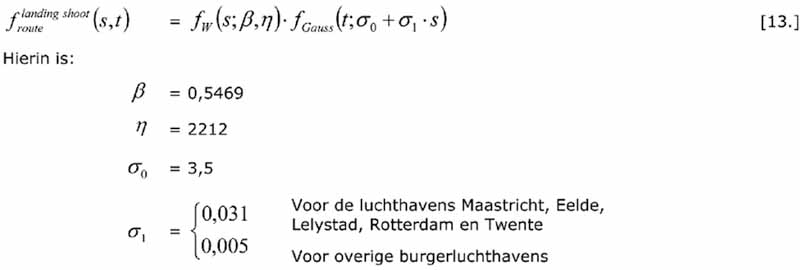
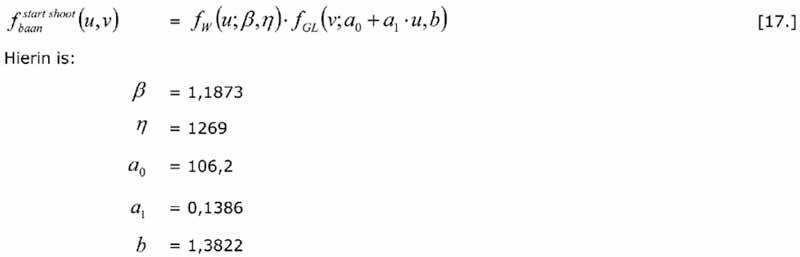
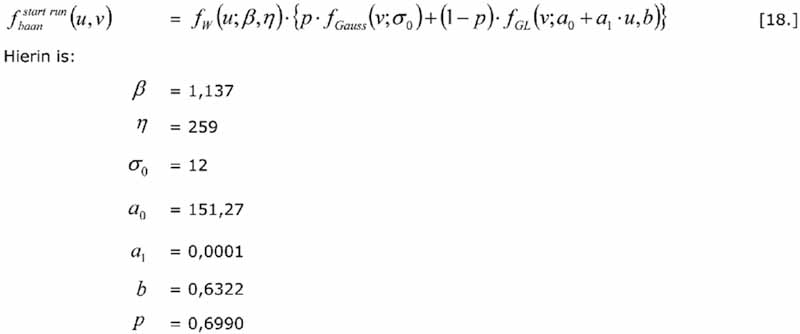
De verdelingsfuncties voor de gewichtscategorie licht zijn als volgt gedefinieerd:
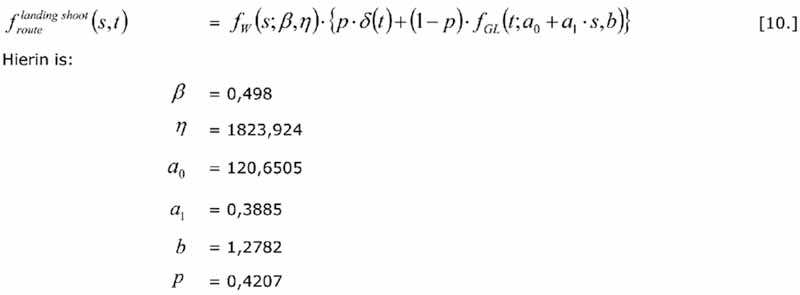
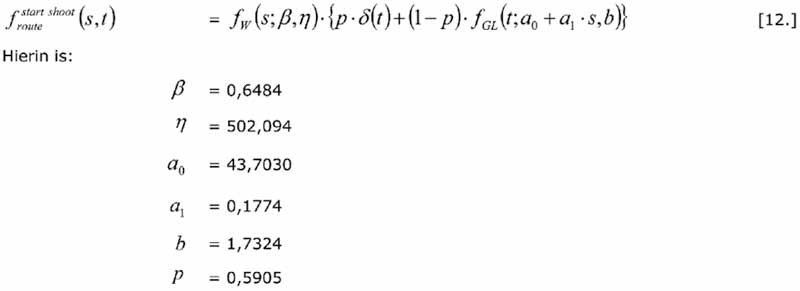
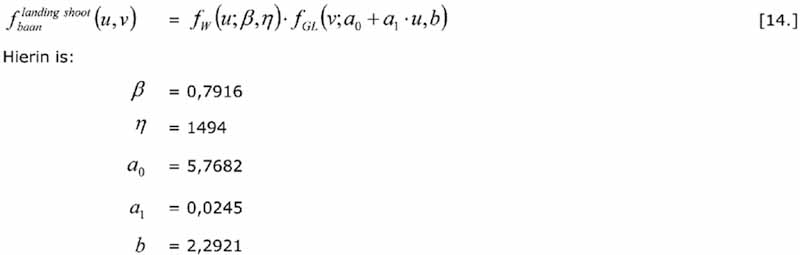
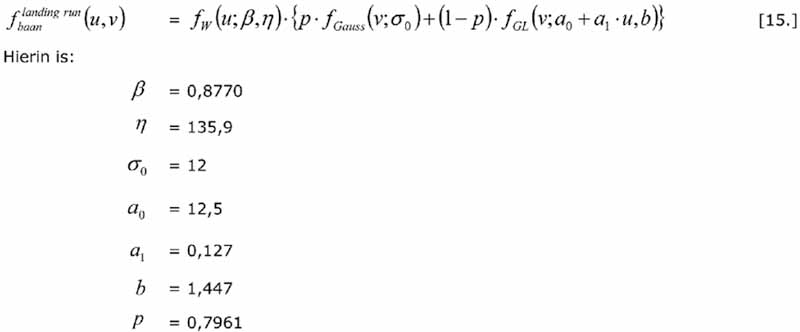
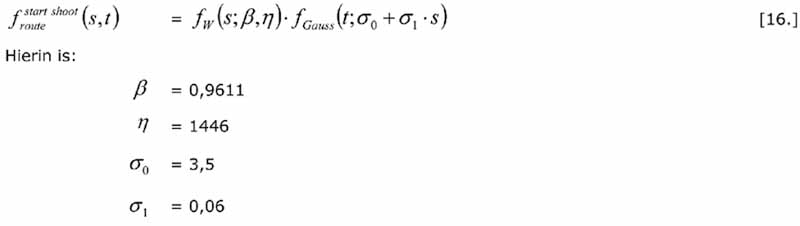
De verdelingsfuncties voor de gewichtscategorie zwaar zijn als volgt gedefinieerd:
3.4.2. Transformatie van coördinaatpunten
Voor het toepassen van een verdelingsfunctie is het nodig om de coördinaten van het celmiddelpunt te transformeren naar het coördinatenstelsel van de verdelingsfunctie. Als de verdelingsfunctie baanafhankelijk is dan wordt de baantransformatie toegepast; als de verdelingsfunctie routeafhankelijk is dan wordt de routetransformatie toegepast. Beiden worden afzonderlijk besproken in het vervolg van deze paragraaf.
Baantransformatie
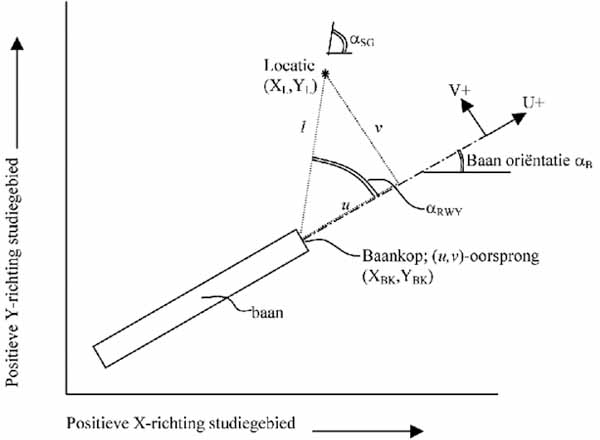
Het (u, v) coördinatenstelsel wordt gebruikt bij het berekenen van het baanafhankelijke deel van de locatiekansen. Om de baanafhankelijke verdelingsfunctie toe te kunnen passen moeten de coördinaten van de celmiddelpunten worden getransformeerd van het (x, y) naar het (u, v) coördinatenstelsel. Het baanafhankelijke (u, v) coördinatenstelsel heeft een cartesiaans assenstelsel, in meters. De oorsprong van het stelsel ligt aan het uiteinde van de baan bij een baankop (XBK,YBK) en de positieve u-as ligt in het verlengde van de baanas, zie Figuur 3. Per baan kunnen twee coördinatenstelsels worden gedefinieerd, aan elke baankop één. Deze coördinatenstelsels zijn ten opzichte van elkaar 180° gedraaid en verschoven langs de baanas.
De baantransformatie is gedefinieerd als de transformatie van het baanafhankelijke coördinatenstelsel (u, v) naar het (x, y) coördinatenstelsel.

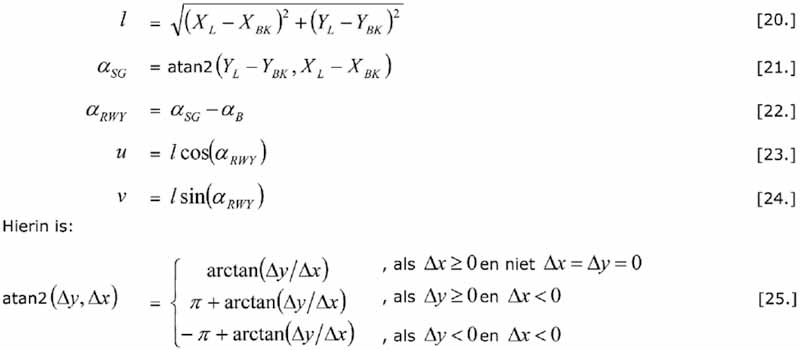
Voor het toepassen van de baanafhankelijke verdelingsfuncties is de omgekeerde bewerking van deze transformatie nodig: de (x, y) coördinaten van het studiegebied worden omgerekend naar de (u, v) coördinaten. De transformatie is weergeven in Figuur 3 en de daarna gegeven formules.
Figuur 3. Baantransformatie
Routetransformatie
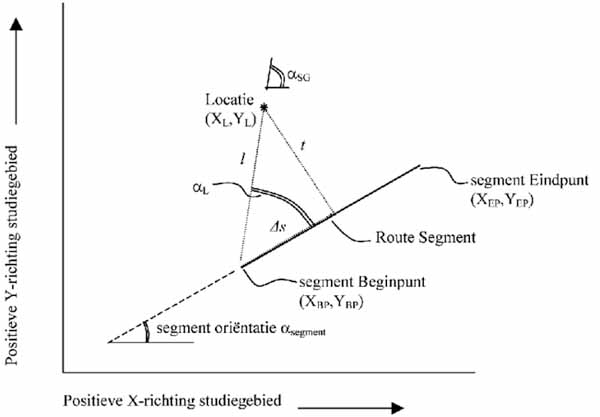
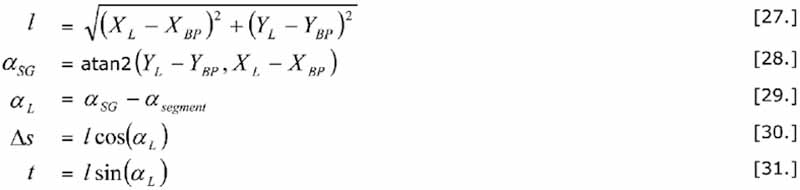
Om de routeafhankelijke verdelingsfunctie toe te kunnen passen moeten de coördinaten van de celmiddelpunten worden getransformeerd van het (x, y) coördinatenstelsel naar het routeafhankelijke coördinatenstelsel (s,t). Het (s,t) coördinatenstelsel is een curvi-lineair coördinatenstelsel, in meters, relatief aan een route. De oorsprong van het stelsel ligt aan het begin van een routesegment (XBP,YBP). Een route bestaat uit rechte routesegmenten en cirkelvormige routesegmenten. De s coördinaat geeft de afstand tot de baandrempel (XBD,YBD) langs de gegeven route en de t coördinaat geeft de afstand loodrecht tot de route. Dit coördinatenstelsel wordt gebruikt bij het berekenen van het routeafhankelijke gedeelte van de locatiekansen.
De routetransformatie is gedefinieerd als de transformatie van het routeafhankelijke coördinatenstelsel (s,t) naar het (x, y) coördinatenstelsel.

Voor het toepassen van de routeafhankelijke verdelingsfuncties is de omgekeerde bewerking van deze transformatie nodig: de (x, y) coördinaten worden omgerekend naar de (s,t) coördinaten. Bij de routetransformatie wordt onderscheid gemaakt tussen de rechte segmenten, de cirkelsegmenten en de behandeling van singuliere punten en discontinuïteiten (zie paragraaf 3.4.3). De transformatie is weergeven in de figuren 4 en 5 en bijbehorende formules.
Rechte segmenten
Figuur 4. Routetransformatie voor rechte segmenten
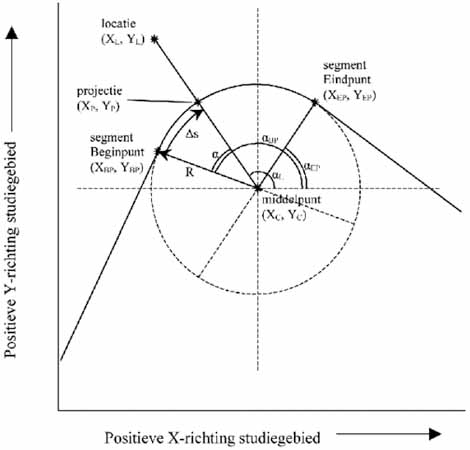
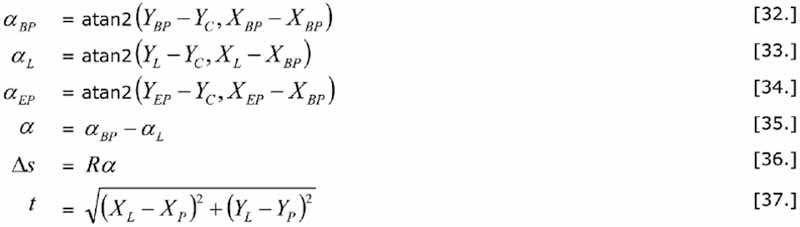
Cirkelsegmenten
Figuur 5. Routetransformatie voor cirkelsegmenten
3.4.3. Singuliere punten en discontinuïteiten
Singuliere punten
Singuliere punten zijn celmiddelpunten die samenvallen met het middelpunt van een cirkelsegment. Singuliere punten krijgen dezelfde waarde als het gemiddelde van de waarden van de omliggende (niet−singuliere) celmiddelpunten.
Discontinuïteiten
Op het gemeenschappelijke punt van twee routesegmenten is een discontinuïteit mogelijk in de richting van de route, zie Figuur 6. Hierdoor kunnen de projecties leiden tot gebieden zonder risico (gaten in de kansverdeling). Op punt P wordt een algoritme toegepast om de gaten op te vullen:
- •
als de projectie van punt P op het eerste routesegment voorbij het einde van het routesegment valt;
- •
en als de projectie van punt P op het volgende routesegment voor het begin van het volgende routesegment valt.
Figuur 6. Visualisatie van gaten in berekende kansverdeling
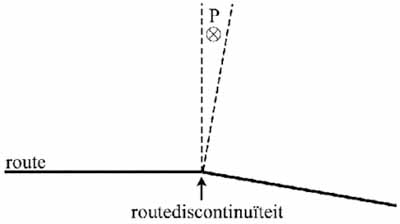
In dat geval wordt voor s de lengte langs de route tot het gemeenschappelijke punt van de twee routesegmenten genomen en voor t de afstand van dit punt tot punt P.
3.4.4. Toepassen van de verdelingsfuncties
Bij de toepassing van de verdelingsfuncties moet zowel met weging van route- en baanafhankelijkheid als met celverfijning rekening worden gehouden. Deze aspecten worden hierna beschreven.
Weging
Weging over de verschillende ongevaltypen, met γ en αs en αl als weegfactoren, dient te worden toegepast bij de verdere bepaling van de kansdichtheden per beweging.
Voor landingen licht verkeer:

Voor starts zwaar verkeer:

Voor landingen zwaar verkeer:

Celverfijning
Om de invloed van de keuze van het raster te beperken, dient in een deel van het rekenraster, de maaswijdte te worden verkleind. Dit deel van het rekenraster, het verfijninggebied, is het gebied waarin de s of de u coördinaat kleiner is dan 10 km en de absolute waarde van de t of de v coördinaat kleiner is dan 1 km. Een cel waarvan het celmiddelpunt in dit gebied ligt, dient in honderd gelijke subcellen te worden opgesplitst door de lengte en breedte van zo’n cel door 10 te delen. In ieder subcel dient de locatiekans te worden berekend. De locatiekans voor de cel wordt gelijk gesteld aan het gemiddelde van alle locatiekansen in de honderd subcellen.
3.5. Ongevalgevolg
Het ongevalgevolg bij een ongeval wordt bepaald door het oppervlak van het schadegebied, het ongevalgevolggebied, en de kans op overlijden, de letaliteit, in dit gebied.
Ongevalgevolggebied
Bij een ongeval met een vliegtuig is het ongevalgevolggebied het schadegebied waarin personen buiten het vliegtuig slachtoffer kunnen worden. Het oppervlak van het ongevalgevolggebied is afhankelijk van het MTOW en de vliegtuigcategorie. Voor de categorie licht1500 wordt het oppervlak constant verondersteld en voor de overige categorieën geldt een lineair verband tussen MTOW en ongevalgevolggebied, zie Tabel 5.
Vliegtuigcategorie | Omvang ongevalgevolggebied |
|---|---|
Licht1500 | 145 m2 |
Licht5700 | 78 m2 per 1.000 kg MTOW + 28 m2 |
Business Jet | 83 m2 per 1.000 kg MTOW |
Cargo | 83 m2 per 1.000 kg MTOW |
Cargo Gen.1 | 83 m2 per 1.000 kg MTOW |
Cargo Gen.2 | 83 m2 per 1.000 kg MTOW |
Cargo Gen.3 | 83 m2 per 1.000 kg MTOW |
Pax Gen.1 | 83 m2 per 1.000 kg MTOW |
Pax Gen.2 | 83 m2 per 1.000 kg MTOW |
Pax Gen.3 | 83 m2 per 1.000 kg MTOW |
Het ongevalgevolggebied wordt gemodelleerd als een cirkelvormig gebied rond de ongevallocatie met straal ROGB:

Letaliteit
De letaliteit is de fractie mensen buiten het vliegtuig, maar binnen het ongevalgevolggebied, dat bij een vliegtuigongeval overlijdt. De letaliteit is afhankelijk van de vliegtuigcategorie, zie Tabel 6. Buiten het ongevalgevolggebied is de letaliteit per definitie nul.
Vliegtuigcategorie | Letaliteit |
|---|---|
Licht1500 | 0,13 |
Licht5700 | 0,13 |
Business Jet | 0,278 |
Cargo | 0,278 |
Pax Gen.1 | 0,278 |
Pax Gen.2 | 0,278 |
Pax Gen.3 | 0,278 |
3.6. Cellen binnen ongevalgevolggebied
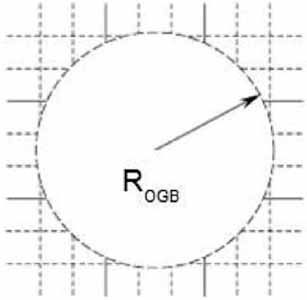
Een ongeval in cel i van beweging j draagt bij aan het plaatsgebonden risico in elke naburige cel die geheel of gedeeltelijk overlapt met het ongevalgevolggebied, zie Figuur 7. De bijdrage in cel k is gelijk aan het product van de (fractie) overlap van het ongevalgevolggebied in cel k, de letaliteit en de ongevallocatiekans in cel i van beweging j.
Figuur 7. Overlap van cellen en ongevalgevolggebied
4. Berekenen plaatsgebonden risico helikopters
Dit hoofdstuk beschrijft de te volgen rekenmethodiek voor het plaatsgebonden risico van helikopterbewegingen voor zover afwijkend van de methodiek voor vliegtuigen in hoofdstuk 3. De paragrafen 3.1, 3.2 en 3.6 zijn ook van toepassing voor helikopters. Celverfijning (paragraaf 3.4.4) wordt toegepast in de berekening van het plaatsgebonden risico voor helikopters. Indien voor het berekenen van plaatsgebonden risico van helikopters een start- en landingsbaan wordt gebruikt, wordt ook baantransformatie zoals beschreven in paragraaf 3.4.2 toegepast in de transformatie van (u,v) coördinaten naar (x,y) coördinaten. De modellering van ongevalkansen, ongevallocaties en ongevalgevolgen wordt in de volgende paragrafen behandeld.
4.1. Ongevalkans
Onderstaande tabel geeft per categorie en type beweging de te hanteren ongevalkansen.
Helikoptercategorie | Start | Landing |
|---|---|---|
SEP training en instructie | 4,746 × 10-6 | 4,524 × 10-6 |
SEP overige doeleinden | 1,482 × 10-6 | 1,164 × 10-6 |
SET | 1,482 × 10-6 | 1,164 × 10-6 |
MET | 1,051 × 10-6 | 1,608 × 10-6 |
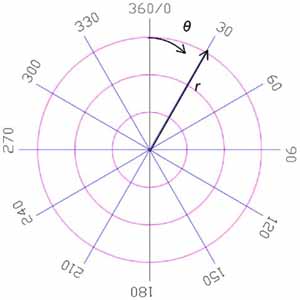
4.2. Ongevallocatiekansen
Ook bij helikopters wordt de ruimtelijke kansverdeling van ongevallen in de nabijheid van een helikopterlandingsplaats over locaties bepaald met verdelingsfuncties. Bij de uitwerking van deze locatiekansen wordt onderscheid gemaakt in start en landing. De locatie van de beschouwde cel (i) wordt uitgedrukt in poolcoördinaten (r,θ), zie Figuur 8. De oorsprong van het coördinatenstelsel valt samen met de coördinaten (XH,YH) van de helikopterlandingsplaats. De straal r geeft de afstand tot de helikopterlandingsplaats in meters. De hoek θ geeft de aan- of uitvliegrichting in graden ten opzichte van het noorden, met de positieve draairichting van noord naar oost.
Figuur 8. Definitie van het coördinatenstelsel voor de helikopter ongevallocaties
Het verband tussen de locatiekans en de afstand tot de helikopterlandingsplaats wordt beschreven met een Weibull kansverdeling:

De waarden van de parameters a en b bij start en landing zijn:
Ongevaltype | Parameters van de Weibull distributie | |
a (Schaal) | b (Vorm) | |
Landing | 655,0860 | 0,8070 |
Start | 611,4669 | 1,0300 |
Het verband tussen de ruimtelijke verdeling van ongevallocatiekans en de aan- en uitvliegrichting wordt gegeven door de sectorverdeling. De aan- en uitvliegrichtingen worden ingedeeld in sectoren. Elke sector beschrijft een deel van de aan- en uitvliegrichtingen waarbinnen een bepaald deel van de vluchten plaatsvindt. Een sector heeft twee grenzen: een linkergrens (minimum hoek θ) en een rechtergrens (maximum hoekθ). Deze grenzen bepalen de ingesloten sectorhoek (Δθ). Ook heeft iedere sector een verkeerspercentage dat beschrijft welk deel van het totaal aantal vluchten via de betref-fende sector vliegt. De sectorverdeling is een invoerparameter.
De locatiekans PL wordt beschreven door de Weibull functie fWeibull en de sectorverdeling qn(θ). De laatstgenoemde geeft voor een hoek θ de verkeersfractie per graad of per radiaal. De sectorverdeling qn(θ) is een discrete functie die de verkeersdichtheid geeft door middel van een blokfunctie (histogram).

De ongevallocatiekans op een locatie (r,θ) is het product van de ongevalkans van de beweging j, en de locatiekans bij straal r, en aan- of uitvliegrichting θ met daarbij horende de verkeersfractie:

Transformatie van coördinaatpunten
Bij de transformatie van poolcoördinaten (r,θ) naar het (x, y) coördinatenstelsel wordt de term 1/r (Jacobiaan) op de locatiekans geïntroduceerd.

4.3. Ongevalgevolg
Net als bij een vliegtuig wordt het ongevalgevolg bij een ongeval met een helikopter bepaald door het oppervlak van het schadegebied en de letaliteit in dit gebied.
Ongevalgevolggebied
Het ongevalgevolggebied wordt bepaald door het MTOW van de helikopter. De grootte van het ongevalgevolggebied (AOGB) is:

Met MTOW in 1.000 kg.
Het ongevalgevolggebied wordt gemodelleerd als een cirkelvormig gebied rond de ongevallocatie met straal ROGB:

Dit verband geldt zolang het MTOW kleiner of gelijk is aan 12.000 kg.
Letaliteit
De letaliteit is de fractie mensen buiten de helikopter, maar binnen het ongevalgevolggebied, dat bij een helikopterongeval overlijdt. De letaliteit voor helikopterongevallen is vastgesteld op een waarde van 0,17.5.
5. Genereren van plaatsgebonden risicocontouren
Plaatsgebonden risicocontouren verbinden punten met een gelijk plaatsgebonden risico. Het bepalen van contouren is een nabewerking op de berekening van de plaatsgebonden risico’s in celmiddelpunten als beschreven in voorgaande hoofdstukken. Het uitgangspunt voor het genereren van de plaatsgebonden risicocontouren is het netwerk, waarvan in de celmiddelpunten de risicowaarden berekend zijn. Voor de plaatsgebonden risicocontouren dient het proces, zoals hieronder beschreven, te worden doorlopen.
Opzoeken van startpunten
In het gebruikte rekennetwerk worden opeenvolgende omslagpunten bepaald. Deze omslagpunten markeren punten van de contour. Elk netwerklijnstuk (lijnstuk tussen twee naburige celmiddelpunten) wordt onderzocht op tekenomslag. Met tekenomslag wordt bedoeld dat in het ene celmiddelpunt de risicowaarde groter is dan – en in het naburige celmiddelpunt kleiner is dan of gelijk is aan – de gewenste contourwaarde. Indien tekenomslag plaatsvindt, wordt op dit lijnstuk een omslagpunt bepaald. Een omslagpunt, met gewenste contourwaarde, op een netwerklijnstuk wordt bepaald door lineaire interpolatie van de risicowaarden in de twee naburige celmiddelpunten.
Eerst wordt de rand van het netwerk onderzocht. Daarna is de volgorde waarin de netwerklijnstukken worden onderzocht willekeurig. Het eerstgevonden omslagpunt is het startpunt in het hierna beschreven proces.
Opzoeken van opeenvolgende omslagpunten
De opeenvolgende omslagpunten dienen op volgende wijze te worden bepaald:
- 1.
Bij een startpunt aan de rand van het netwerk. Ga na of op één van de drie overige zijden van betreffende netwerkvierkant tekenomslag plaatsvindt. Is dit het geval, dan wordt op die zijde een volgend omslagpunt berekend. Indien op alle drie zijden tekenomslag plaatsvindt, dan moeten omslagpunten berekend worden op beide aanliggende zijden. Het omslagpunt dat volgt op het startpunt is het punt met de kortste afstand tot het startpunt.
- 2.
Bij een startpunt binnen het netwerk. De volgorde waarin de netwerkzijden van de aangrenzende netwerkvierkanten worden onderzocht op tekenomslag is willekeurig. Indien tekenomslag plaatsvindt op alle drie overige zijden van een netwerkvierkant, dan wordt het volgende omslagpunt bepaald op soortgelijke wijze als onder 1.
- 3.
Bij een omslagpunt dat geen startpunt is. Bepaald wordt welk van de twee aan het omslagpunt grenzende netwerkvierkanten voor verdere verwerking in aanmerking komt. Dit is het netwerkvierkant dat voor de bepaling van dat omslagpunt nog niet gebruikt is.
Voor het bepalen van het volgende omslagpunt, wordt vervolgens nagegaan op welk van de overige drie zijden van dit vierkant tekenomslag plaatsvindt. Indien tekenomslag op alle drie overige netwerkzijden tekenomslag plaatsvindt, dan worden omslagpunten (K en M) berekend op beide aanliggende netwerkzijden. Vanuit het omslagpunt op de ‘basis’-zijde van het netwerkvierkant worden verbindingslijnen (k en m) getrokken naar de punten K en M en een verbindingslijn (n) naar het voorlaatst bepaalde omslagpunt. Van de twee laatst berekende omslagpunten wordt als volgende omslagpunt dat punt gekozen waarvan de verbindingslijn k of m de kleinste richtingsverandering met de lijn n tot gevolg heeft.
Het zoeken naar achtereenvolgende omslagpunten wordt gestaakt indien aan één van de onderstaande condities is voldaan:
- 1.
het gevonden omslagpunt valt samen met het startpunt,
- 2.
het gevonden omslagpunt ligt op de rand van het netwerk.
Voor een eenduidig resultaat wordt per gewenste contourwaarde een vaste rangschikking van de gevonden omslagpunten bepaald.
Voor een reeks van achtereenvolgende omslagpunten, waarvan het startpunt op de rand van het netwerk ligt, geldt dat het eerste punt in die rangschikking het omslagpunt is op de rand van het netwerk met de kleinste x-coördinaat t.o.v. de oorsprong van het netwerk (i=1 en j=1). Indien twee oplossingen mogelijk zijn dan geldt dat het eerste punt wordt bepaald door het omslagpunt op de rand van het netwerk met de kleinste y-coördinaat t.o.v. de oorsprong van het netwerk.
Voor een reeks van achtereenvolgende omslagpunten, waarvan het startpunt niet op de rand van het netwerk ligt, geldt dat het eerste punt in die rangschikking het omslagpunt is met de kleinste afstand tot de oorsprong van het netwerk. De volgorde in de rangschikking van omslagpunten ligt in het eerstgenoemde geval vast en is in het laatstgenoemde geval in de richting tegen de wijzers van de klok in.
Door de gevonden omslagpunten met lijnstukken aan elkaar te verbinden, worden de contouren zichtbaar gemaakt.
6. Bepalen beperkingengebieden
Voor het nader bepalen van de grens van een beperkingengebied in een luchthavenbesluit op basis van plaatsgebonden risicocontouren, dienen de berekende contouren gestileerd te worden. Voor de vaststelling van sloopzones dient daarnaast rekening te worden gehouden met de invloed van jaarlijkse fluctuaties in het weer op het baangebruik.
6.1. Stileren van contouren
Bij het stileren dienen de volgende uitgangspunten in acht te worden genomen:
- 1.
De gestileerde contouren vormen het gebied waar de wettelijke beperkingen voor 10-5 en 10-6 gelden. Dit houdt in dat er geen onderscheid meer is tussen gebied binnen de berekende modelcontour en extra, omwille van stilering, toegevoegd gebied.
- 2.
De gestileerde contouren vormen het uitgangspunt voor het omgevingsplan.
- 3.
De keuze voor de wijze van stileren moet direct gerelateerd zijn aan het gebruik van de luchthaven en mag geen andere beleidsdoeleinden dienen, zoals het openhouden van gebieden of onnodig weren van ruimtelijke functies.
- 4.
Lange smalle uitlopers van risicocontouren (zogenaamde ‘risicostaarten’) kunnen afgekapt worden op een bepaalde afstand van de baankop. De afstand voor afkap van de contour is ofwel;
- a.
de afstand waar de breedte B van de contour smaller wordt dan 60 m, of
- b.
de afstand waar de contour smaller is dan 2% van de lengte L van de contour (B < 0,02L). Voorbeeld: afkap van de contour op 3.500 m van de baankop als de contour daar smaller wordt dan 70 m.
- 5.
Eilanden in het verlengde van de contour kunnen worden weggelaten indien smaller dan 60 meter.
- 6.
Bij het stileren kan aangesloten worden bij ‘logische’ ruimtelijke begrenzingen als perceelgrenzen, infrastructuur, gebiedsgrenzen en bebouwing. Dit mag evenwel niet tot een vermindering van het aantal (beperkt) kwetsbare bestemmingen leiden, bijvoorbeeld omdat ze wel binnen de zone liggen bij een afkap bij 60m breedte. Het gaat hierbij om zowel bestaande als toekomstige bestemmingen.
- 7.
Bij circuits is afkap mogelijk na de eerste en voor de laatste bocht van 90 graden in het horizontale vlak ten opzichte de baan.
- 8.
Een rafelig of zaagtand-achtig verloop van de contour kan worden vervangen door een rechte lijn tussen de hoekpunten.
- 9.
De gestileerde contour dient minimaal de vorm en oppervlakte van de berekende modelcontour, exclusief ‘afgekapte staart’, op hoofdlijn te handhaven en mag dus niet leiden tot kleinere gebieden dan waar de berekende risico’s voorkomen.
- 10.
Het stileren dient plaats te vinden op een kaart waarbij de breedte van de gestileerde contourlijn passend is om te kunnen bepalen of de objecten binnen of buiten de contour liggen. Om deze rede[lees: reden] en conform de Wet ruimtelijke ordening is het aan te bevelen om de gestileerde contouren middels zogenoemde ‘GIS-bestanden’ digitaal beschikbaar te hebben.
Er is geen algemeen toepasbare wiskundige formule voor het stileren van de externe veiligheidscontouren. Het gaat om (lokaal) maatwerk. Binnen de marges, uitgangspunten en overwegingen van de gegeven uitgangspunten kan het bevoegd gezag hier een passende invulling aan geven. Zie onderstaande figuur.
Voorbeeld stilering van contouren
In aanvulling op de uitgangspunten, dus niet in afwijking, kunnen bij het stileren van de plaatsgebonden risicocontouren aanvullende overwegingen meegenomen worden. Zo kan het helpen om bij de stilering van contouren rekening te houden met voorzienbare toekomstige ontwikkelingen in het baangebruik op de luchthaven; zoals een wijziging in de vliegprocedures die (verder) geen aanpassing van het luchthavenbesluit vergt. Hiermee kan de planologische rust en continuïteit van het luchthavenbesluit worden versterkt.
Het stileren van de sloopzones kan indien gewenst eventueel ook gebaseerd worden op de omhullende contour van enkele bepalende 10-5 plaatsgebonden risicocontouren voor enkele individuele (extreme) meteojaren in plaats van op de berekening met meteotoeslag, beschreven in paragraaf 2.7., van het verkeersscenario dat als basis dient van het als luchthavenbesluit. Voor de bepalende meteojaren wordt het (maximaal) baangebruik in de verschillende baanrichtingen afgeleid en worden de 10-5 plaatsgebonden risicocontouren berekend.
7. Totaal risicogewicht
Het Totaal risicogewicht (TRG) is gedefinieerd als het product van de totale ongevalkans en het MTOW per beweging, gesommeerd voor alle bewegingen (m) in een jaar.
De totale ongevalkans voor een beweging j(P0,j) is de som van de afzonderlijke kansen op alle ongevaltypen (P0,j,ot):

Het TRG volgt uit:

De grenswaarde voor het TRG wordt bepaald op basis van het verkeersscenario dat als basis dient voor het luchthavenbesluit of de luchthavenregeling.
Referenties
[Ref. 1] | Voorschrift en procedure voor de berekening van Externe Veiligheid rond luchthavens, (NLR-CR-2004-083). Nationaal Lucht- en Ruimtevaartlaboratorium NLR, februari 2004. |
[Ref. 2] | A model to calculate third party risk due to civil helicopter traffic at heliports, With the focus on inland heliports in the Netherlands (NLR-CR-2007-003), Nationaal Lucht- en Ruimtevaartlaboratorium NLR, december 2008. |
[Ref. 3] | Rapportage van de werkzaamheden in het kader van follow-up Review Externe Veiligheidsmodel, Augustus 2006 tot en met december 2008 (NLR-CR-2009-123 in concept), Nationaal Lucht- en Ruimtevaartlaboratorium NLR, 2009. |
[Ref. 4] | Memo Meteomarge kleine luchthavens, Ir J. Th. Knapen, april 2002. |